a) Fahrzeugen sinnvolle Fahrtrouten zuweisen
c) Fahrzeuge in sicherem Abstand hintereinander her fahren lassen
d) Fahrzeuge selber bauen
e) Fahrzeuge automatisch auf der Anlage nachladen
Zu diesem Projekt wurden wir angeregt durch ein neues Vereinsmitglied, das eine Infrarot-Steuerung für die kleinen Autos plante. Leider ist der Kollege ganz plötzlich verstorben und hat all sein Wissen mitgenommen. Dies war schon in 2010.
Wir mußten damals also wieder bei Null anfangen und hatten nichts als diese gute Idee. Diese wurde, da sehr aufwendig, immer wieder nebenher bearbeitet und ist daher sehr lange bei uns 'gereift'.
Sehr viel Theorie, und warum wir das so machen und nicht anders
Und noch ein wichtiger Grund für den Eigenbau:
Das käufliche System erfordert in den Fahrzeugen eine Versorgungsspannung von 3,6 Volt, bedingt durch die dort verwendeten Microcontroller. Damit hätten wir auf unserer Anlage neben den Fahrzeugen mit 2,4 Volt und den 'Einzellern' eine dritte Versorgungsspannung mit der Folge eines Chaos bei den Ladegeräten; ganz abgesehen von den Platzproblemen in kleinen Fahrzeugen. Wir wären also gezwungen, in unsere Ladestationen eine dritte Schaltstufe einzubauen, nur um mit dieser die geforderte Spannung beim Laden zur Verfügung zu stellen. Weiterhin: da die zu verwendenden Akkus entweder 3-Zeller oder LiPo-Akkus sein müßten, ergibt sich bei kleinen Autos entweder ein Platzproblem oder eine gefährliche Sache, denn nicht jeder sollte mit LiPo-Akkus umgehen dürfen (Brandgefahr). Und - die LiPos erfordern eine komplett andere Lade-Strategie, so daß auch hier ein völlig neues Konzept ausgedacht werden müßte.
Dann doch lieber alles selber entwerfen, so daß "alles aus einem Guß" ist.
Inzwischen sind wir ja einen Schritt weiter: durch das IC TPS61221 erhalten wir an unseren Elektroniken immer 3,3 Volt, egal, ob wir eine oder 2 Akku-Zellen zur Verfügung haben.
Wir haben vor, im Stadtbereich nur sehr wenige LKW fahren zu lassen. Das hohe Ziel ist es, einen VW-Käfer zu automatisieren. Mit ziemlicher Sicherheit wird uns das nicht gelingen, aber ein Opel Rekord sollte es schon sein. Da können wir schon aus Platzgründen keine vorgefertigten Fremd-Fabrikate einbauen. Unser Bulli, der ja noch "eine Nummer größer" ist, beweist es.
Wir sind uns durchaus bewußt, daß unser System nicht kompatibel zu anderen Systemen ist. Wir können uns aber auch kein Szenario vorstellen, in dem ein Fremder sein umgerüstetes FCS-DCC-Fahrzeug bei uns laufen lassen wollte und umgekehrt.
Was aber leider überall verschwiegen wird: Das käufliche und auch unser System übermitteln nur Befehle in die Fahrzeuge. Wann und wo und bei welcher Gelegenheit ein Fahrzeug welchen Befehl erhalten soll - mit dieser Planung steht der Anwender allein auf weiter Flur!
Eine gute Hilfe hierzu ist bei H. Dankwardt zu finden.
Es ist also mit der Befehlsübertragung bei weitem nicht getan! Jeder Anwender ist gehalten, eine wie auch immer geartete Organisations-Logik aufzubauen, die entscheiden kann, welcher Befehl wann gesendet werden soll. Im allereinfachsten Fall könnte dies ein Relais-Kontakt sein, der bei einer von Hand gestellten Weiche z.B. den Befehl 'Blinker rechts ein' übermittelt. Hinter dieser Weiche muß dann natürlich ein weiterer Befehl namens 'Blinker aus' gesendet werden. Oder an einer Ampel müßte ein Kontakt eingebaut werden, der bei Rot den Befehl 'Stop' schaltet.
Wir hatten vor Ur-Zeiten eine einfache Faller-Car-Steuerung entwickelt, die leider (oder auch nicht) nie aus dem Versuchsstadium herausgekommen ist. Ein paar Teile hiervon werden wir wohl verwenden können, z.B. zur Koordinierung des Verkehrsflusses; also für die 'Verteilung der Befehle'.
Unser System soll unterscheiden können zwischen den einzelnen Fahrzeugarten wie oben schon beschrieben. Dazu haben wir an den einzelnen Fahrzeugen Sender angebracht, die an Empfänger am Straßenrand signalisieren, was für ein Typ Fahrzeug gerade vorbeifährt. So könnte ein 'Bus' über eine Weiche in eine Parkbucht geleitet werden und dort anhalten; aber eben kein anderes Fahrzeug! All dies haben wir bei sinnvolle Fahrtrouten schon beschrieben.
Wie weit sind wir?
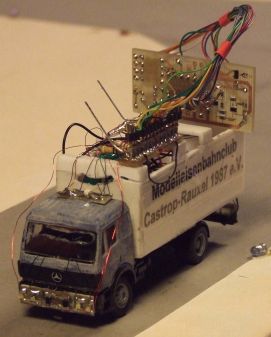 Von den urzeitlich anmutenden Zuständen (s. Bild rechts) haben wir uns schon mächtig entfernt. Aber
steuern können wir immer noch nicht. Das liegt auch an den Prioritäten, die wir uns gesetzt haben: erst
die Fahrzeugerkennung.
Von den urzeitlich anmutenden Zuständen (s. Bild rechts) haben wir uns schon mächtig entfernt. Aber
steuern können wir immer noch nicht. Das liegt auch an den Prioritäten, die wir uns gesetzt haben: erst
die Fahrzeugerkennung.Der Befehlsgenerator ist schon seit Jahren fertig. Die Übertragung per Infrarot klappt ebenfalls bis zu einer Entfernung von ca. 17 cm. Das reicht völlig aus. Ganz im Gegenteil: eine höhere Reichweite würde auch weiter entfernte Fahrzeuge beeinflussen. Und gerade das wollen wir vermeiden!
Der Decoder 'versteht' inzwischen alle Befehle und reagiert auch richtig, indem er Lampen und Motor ansteuert.
Was muß noch getan werden?
Was noch fehlt, ist die Abstandssteuerung. Problematisch sind die LEDs, die hinten in die Fahrzeuge eingebaut werden müssen, um den Nachfolger zu informieren. Diese LEDs müssen sehr breit strahlen, damit sie auch in Kurven erkannt werden. Hierbei ist aber deren Helligkeit nicht ausreichend. An einem Kompromiß wird noch heftigst geknobelt. Wir werden höchstwahrscheinlich einen deutlich erhöhten Stromverbrauch in Kauf nehmen. Da wir aber eine Akku-leer-Erkennung eingebaut haben, und diverse Ladestationen an der Straße vorhanden sein werden, wird dies wohl nicht problematisch werden.
Die Straßen müssen für die neuen Erfordernisse umgebaut werden: ein Team arbeitet an der Streckenführung und wird die Infrarot-LEDs einbauen, die die Fahrzeuge steuern.
Jedes Fahrzeug wird zwei Platinen erhalten: einen Sender, der treudoof nichts weiter tut als die Fahrzeugkennung abzustrahlen, und einen Decoder, der die Steuerbefehle von der Straße empfängt.
Ideen haben wir noch genug!
Zum Beispiel die einer Drehzahl-Regelung der Motoren, damit sie auch sicher langsam fahren können. Wer das einmal gesehen hat: "das will ich auch!"
Ein Testsystem zur Drehzahlregelung läuft zufriedenstellend. Nun muß "nur noch" die dortige Software in die Steuerung implementiert werden.
 An der Platine für den Fahrzeug-Decoder wird fleißig 'geändert'. Wegen des geringen Platzes werden
wir zwei Größen bauen, eine für LKW und eine für Kleinfahrzeuge. Die letztere werden wir
fertigen lassen. Für Insider: Bauteile mit Abmessungen 0402, SC-70 oder QFN-16 sind nicht mehr so einfach zu
handhaben. Dazu braucht man Profis. Die derzeit geplante kleine Platine ist nur 14 x 8 mm groß, 2-seitig
bestückt. Im Bild links ein Prototyp, viel zu dick, noch unbestückt. Den haben wir vorab fertigen lassen,
nur um zu sehen, ob es überhaupt möglich ist, so etwas passend zu bauen. Er liegt, zum
Größenvergleich, auf dem freien Platz in unserem Bulli. Das sieht recht gut aus.. Scheint's wird der
Bulli dann aber ohne Fahrer unterwegs sein müssen ...
An der Platine für den Fahrzeug-Decoder wird fleißig 'geändert'. Wegen des geringen Platzes werden
wir zwei Größen bauen, eine für LKW und eine für Kleinfahrzeuge. Die letztere werden wir
fertigen lassen. Für Insider: Bauteile mit Abmessungen 0402, SC-70 oder QFN-16 sind nicht mehr so einfach zu
handhaben. Dazu braucht man Profis. Die derzeit geplante kleine Platine ist nur 14 x 8 mm groß, 2-seitig
bestückt. Im Bild links ein Prototyp, viel zu dick, noch unbestückt. Den haben wir vorab fertigen lassen,
nur um zu sehen, ob es überhaupt möglich ist, so etwas passend zu bauen. Er liegt, zum
Größenvergleich, auf dem freien Platz in unserem Bulli. Das sieht recht gut aus.. Scheint's wird der
Bulli dann aber ohne Fahrer unterwegs sein müssen ...
Wir freuen uns ...
... daß inzwischen auch beim kommerziellen DCC-System eine Spannungsversorgung mit nur 1,2 Volt möglich ist. Ob dort wohl auch ein TPS61221 eingesetzt worden ist??
ganz zum Anfang